|
21 March 2023 HYFLIERS project is featured in a Results in Brief article available in six languages (DE, EN, ES, FR, IT, PL) on the CORDIS website. Read how Inspection robots in oil and gas industry improve efficiency and safety. 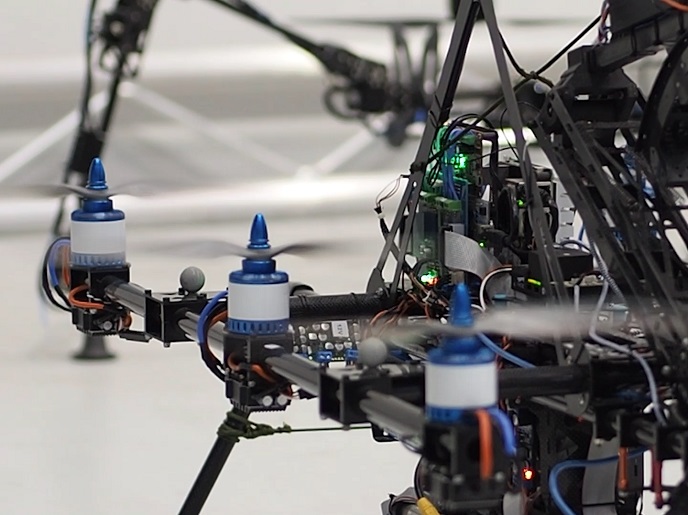
|
|
30 September 2022 HYFLIERS ended successfully.
|
|
1 January 2022 HYFLIERS continues its activities until 30 September 2022. See also project page on CORDIS server.
|
|
28 May 2021 Total changed their name to TotalEnergies. This new identity highlights the strategic transformation of the company towards a broad energy company and a major player in the energy transition. See press release. TotalEnergies seamlessly continues their tasks within the consortium. 
|
|
17 Feb 2021 Prof. Vincenzo Lippiello and Prof. Bruno Siciliano of CREATE presented at TG1 (news on the main Italian public broadcast channel) achievements of HYFLIERS project. See the recording from minute 30:40. 
|
|
13 Feb 2021 Prof. Vincenzo Lippiello of HYFLIERS spin-off Neabotics presented achievements from the project at TGR “Officina Italia” (regional news on technology on the Italian public broadcast channel). See the recording from minute 20:00. 
|
|
2 Nov 2020 HYFLIERS paper by the Robotics, Vision and Control Laboratory (GRVC) of the University of Seville won the Best Application Paper award sponsored by ICROS at IROS 2020: A. Lopez-Lora, P.J. Sanchez-Cuevas, A. Suarez, A. Garofano-Soldado, A. Ollero, G. Heredia (2020) MHYRO: Modular HYbrid RObot for contact inspection and maintenance in oil & gas plants. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). On-line at https://www.iros2020.org/. 
|
|
28 Oct 2020 GE Inspection Robotics (GEIR) is now a part of Waygate Technologies, a Baker Hughes business. See press release. Waygate Technologies Robotics (WTR) seamlessly continues their tasks within the consortium. 
|
|
10-11 Jan 2018 The project had its kick-off meeting in Oulu, Finland. 
|
HYFLIERS (HYbrid FLying-rollIng with-snakE-aRm robot for contact inSpection) is a research and innovation action (RIA) of EU Horizon 2020 programme for advanced robot capabilities research and take-up, worth 3,9 million euro funding. HYFLIERS, running from 2018 to 2022, will develop the world's first industrial integrated robot with hybrid air and ground mobility with a long-reach hyper-redundant manipulator capable of reaching sites where no other robot can access, reducing the exposition of human inspectors to potentially dangerous working conditions. Targeting ultrasonic thickness measurements for oil and gas refineries and chemical plants, the results could be applied to many other robotic inspection technologies.

In oil and gas production plants, all or part of the components are often subject to degradation caused by exposure to the environment or products within the production process. Excessive pipe corrosion may lead to accidents, including catastrophic failures with explosions and release of toxic products, thus having impact on safety, environment and availability of the plant. Inspection processes for thickness measurements ensure that plants are in safe operating condition or provide alerts to execute necessary corrective actions. These measurements are traditionally executed by personnel that requires access to specific locations. Typically, more than 50% (and up to 90%) of these activities are carried out by working at elevated locations with the use of ladders, scaffold, rope access or cranes, and sometimes in presence of high temperatures or toxic materials. Obviously, this causes considerable costs for ensuring safety of inspection personnel but in some cases, casualties may occur. Moreover, anxiety and exposure to dangerous locations affects concentration and promote human errors.
There are safety, quality and cost drivers for novel inspection methods.
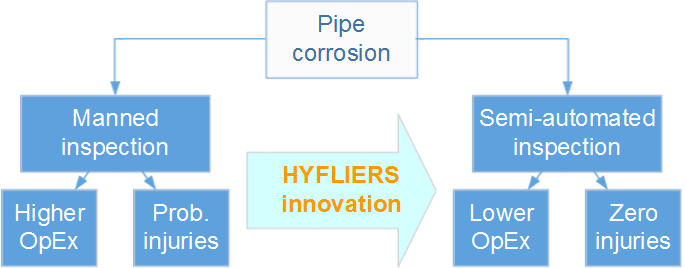
The top objective is to reduce inspection costs and improve safety by exploiting a robotic inspection system. The technology results will be validated in the inspection of pipes, which is a very relevant short-term application, but the results of the project could be also applied to other industrial scenarios, such as power generation plants.
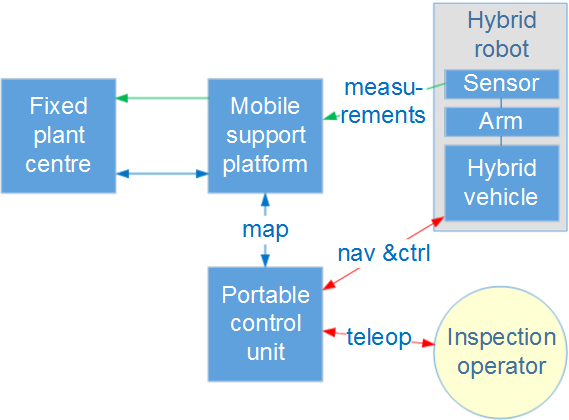
HYFLIERS will address the above objectives by studying, designing, developing and testing a robotic system including prototypes for the first worldwide hybrid aerial/ground robot with a hyperredundant lightweight robotic articulated arm equipped with an inspection sensing sub-system and a ground support unit for efficient and safe inspection in industrial sites. The robot will be equipped with interfaces for teleoperation, but it will also possess automatic collision detection and avoidance. This will ensure accurate positioning, guidance, landing and rolling on constrained surfaces, such as pipes. The control system also integrating environment perception and aerodynamic control will moreover include a mission planning system to optimise the use of the robot in the inspection and therefore bringing energy savings.
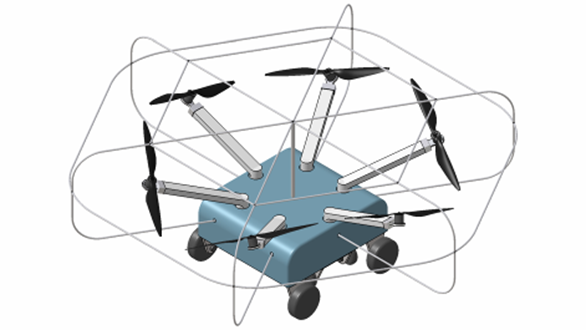
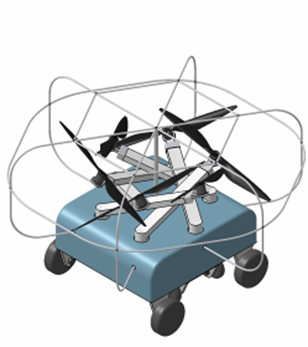
With the HMR prototype, the hybrid robot moves itself to bring the sensor to the inspection site.
The HMR has tilted propellers for improved manoeuvrability plus assisting stability on the pipe (lateral thrust).
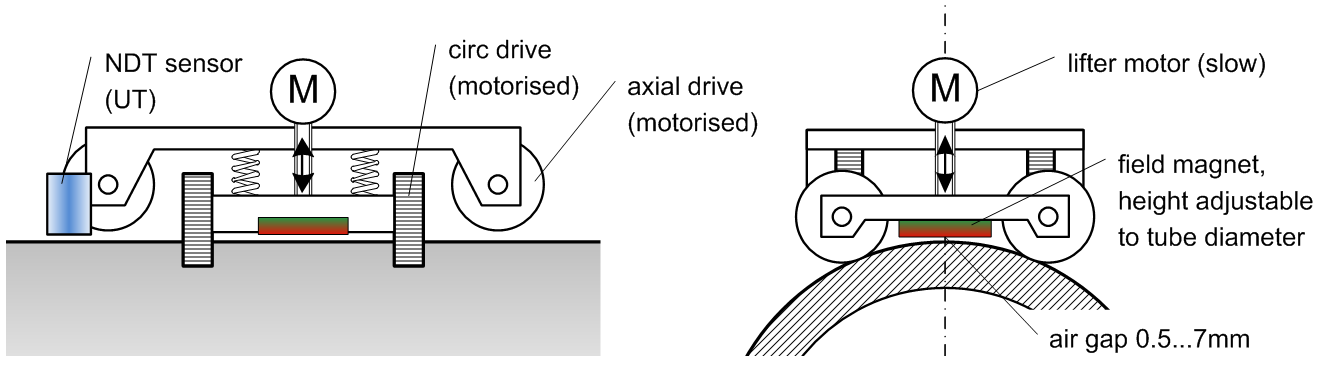 The HMR exploits magnetic attraction for stability on the pipe, and realises magnetic force modulation (varying air gap) for landing/take-off.
The HMR exploits magnetic attraction for stability on the pipe, and realises magnetic force modulation (varying air gap) for landing/take-off.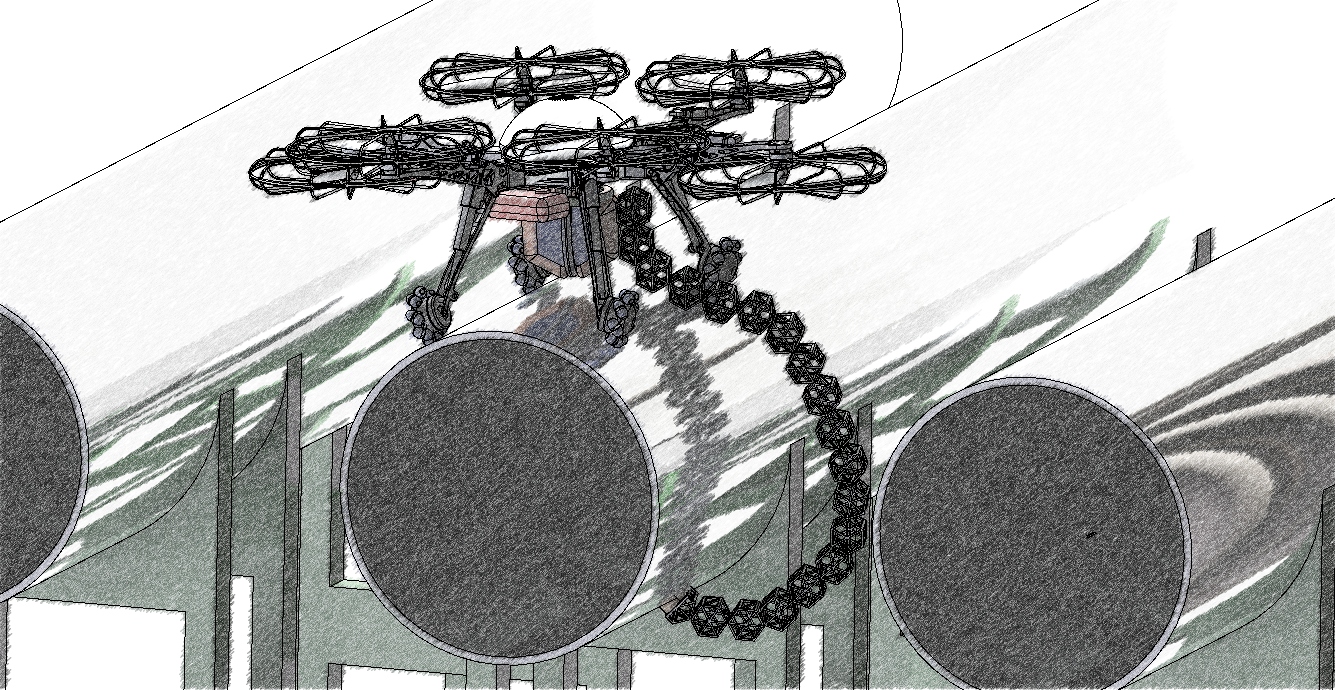
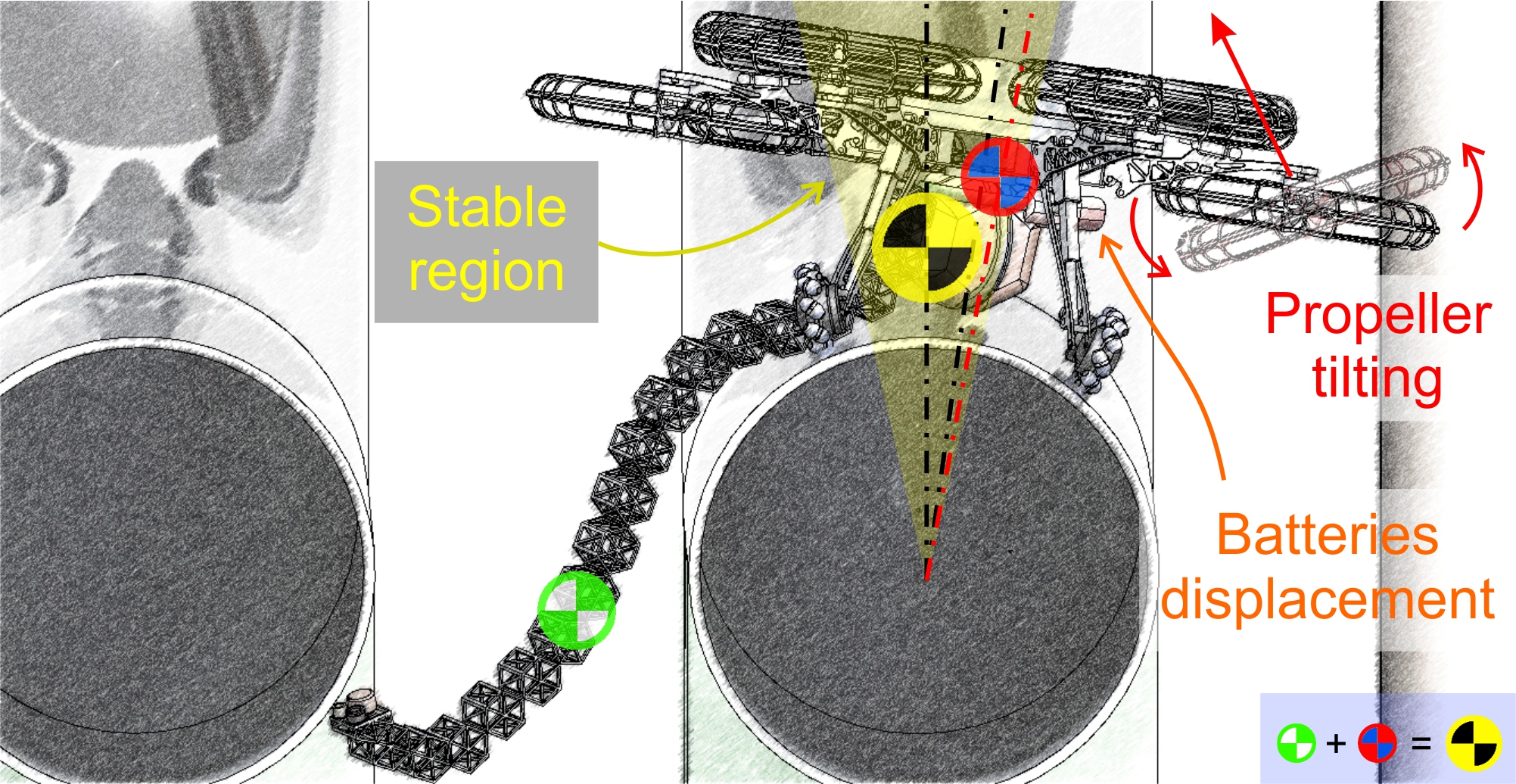
With the HRA prototype, the arm brings the sensor on its end effector to the inspection site, but the vehicle can also crawl over the pipe. Stability of the HRA on pipe is achieved by propeller tilting and by moving the system's centre of gravity (also including batteries displacement).
The operation support system includes a mobile platform for navigation support, battery recharge and couplant refill, also supporting data communication and processing.
The consortium is composed of eight partners from five countries (Finland, Spain, Italy, France and Switzerland), including high reputation universities, research institutes, industrial partners with research and innovation development capabilities, and two world leading oil and gas industrial companies.
| D8.1 | Röning J, ed.; Röning J, Celentano U (2018) Project presentation. Project Deliverable D8.1 (R, PU). 31 Jan. 7 pp. pdf |
| D7.1 | Ollero A, ed.; Celentano U, Röning J, et al. (2018) HYFLIERS project website. Project Deliverable D7.1 (R, PU). 31 Mar. 11 pp. pdf |
| D7.2 | Ollero A, Zesch W, Celentano U, eds.; Röning J, Celentano U, Pitkänen V, Heredia G, Brown R, Corbineau S, Lippiello V, Viguria A, Zesch W (2018) HYFLIERS dissemination and exploitation plan. Project Deliverable D7.2 (R, PU). 31 Mar. 16 pp. pdf |
| D8.2 | Röning J, ed.; Celentano U (2018) Data management plan. Project Deliverable D8.2 (R, PU). 29 Jun. 9 pp. pdf |
| D2.1 | Ollero A, ed. (2019) Design of the hybrid robot. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D2.1 (R, PU). Jun pdf |
| D3.1 | Lippiello V, ed. (2019) Lightweight hyper-redundant robotic arm for aerial inspection tasks. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D3.1 (R, PU). Jun. pdf |
| D4.1 | Celentano U, ed. (2019) Measurement data management service and path planning algorithm. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D4.1 (R, PU). Jun. pdf |
| D7.3 | Kydd K, Ollero A, Celentano U, eds., Röning J, Celentano U, Ollero A, Heredia G, Brown R, Corbineau S, Lippiello V, Viguria Jiménez A, Alarcón F, Schmid R, Giacchetta R (2019) HYFLIERS Dissemination and Exploitation Report P1. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D7.3 (PU). Jun. pdf |
| D3.2 | Lippiello V, ed. (2020) Human-friendly remote-control modalities and in-terfaces of a hyper-redundant robotic arm. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D3.2 (R, PU). Dec. pdf |
| D4.2 | Celentano U, ed. (2020) Navigation support system and operator interface. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D4.2 (R, PU). Dec. pdf |
| D7.4 | Heredia G, ed. (2021) HYFLIERS Dissemination and Exploitation Report P2. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D7.4 (R, PU). May. pdf |
| D3.3 | Lippiello V, ed. (2021) Visual-force control techniques of a hybrid mobile-aerial platform endowed with a robotic arm for au-tonomous inspection with physical interaction. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D3.3 (R, PU). Nov. pdf |
| D2.2 | Heredia G, ed. (2022) Prototypes of the hybrid robots. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D2.2 (DEM, PU). Mar. pdf |
| D4.3 | Celentano U, ed. (2022) Support platform and services. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D4.3 (R, PU). May. pdf |
| D5.1 | Sánchez Cuevas P, ed. (2022) Hybrid robot hardware integration. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D5.1 (DEM, PU). May. pdf |
| D5.3 | Sánchez Cuevas P, ed. (2022) Results of the preliminary testing of the integrated system. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D5.3 (R, PU). Jul. pdf |
| D6.1 | Brown R, ed. (2022) Prototype HMR test protocol, test report, data analysis and conclusions. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D6.1 (R, PU). Sep. pdf |
| D6.2 | Corbineau S, ed. (2022) Prototype HRA test protocol, test report, data analysis and conclusions. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D6.2 (R, PU). Sep. pdf |
| D7.5 | Heredia G, ed. (2022) HYFLIERS Dissemination and Exploitation Final Report. H2020-ICT-25-2016-2017 779411 HYFLIERS Project Deliverable D7.5 (R, PU). Sep. pdf |
| Röning J (2018) Hybrid flying-rolling with snake arm robot for oil and gas plant inspection: The HYFLIERS H2020 project. IEEE International Conference on Robotics and Automation (ICRA), Workshop on Aerial Robotic Inspection and Maintenance: Research Challenges, Field Experience and Industry Needs. 25 May, Brisbane, Australia. | |
| Brown R, Röning J (2018) HYFLIERS: UT inspections at height in congested pipe racks. SPRINT Robotics, World Conference for Inspection and Maintenance Robotics. 13-14 Nov, Galveston, Texas, USA. | |
| Yu Y, Lippiello V (2019) 6D pose task trajectory tracking for a class of 3D aerial manipulator from differential flatness. IEEE Access vol. 7, Apr. pdf | |
| Ruggiero F, Lippiello V, Ollero A (2018) Aerial manipulation: A literature review. IEEE Robotics and Automation Letters, vol. 3 no. 3, Jul. pdf | |
| Caballero A, Bejar M, Ollero A (2018) On the use of velocity adaptation to outperform the motion planning with dynamics awareness in aerial long-reach manipulators with two arms. International Conference on Unmanned Aircraft Systems (ICUAS), pp. 1125–1133. | |
| Ramon-Soria P, Gomez-Tamm AE, Garcia-Rubiales FJ, Arrue BC, Ollero A (2019) Autonomous landing on pipes using soft gripper for inspection and maintenance in outdoor environments. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nov, Macao, China. pdf | |
| Sanchez-Cuevas PJ, Martín V, Heredia G, Ollero A (2019) Multirotor aerodynamic effects close to obstacles: Modelling and mapping. ROBOT Iberian Robotics Conference, Nov, Porto, Portugal. pdf | |
| Nekoo SR, Acosta JA, Ollero A (2019) Fully coupled six-DoF nonlinear suboptimal control of a quadrotor: Variable-pitch rotor design. ROBOT Iberian Robotics Conference, Nov, Porto, Portugal. pdf | |
| Ramon-Soria P, Arrue BC, Ollero A (2019) A 3D-printable docking system for aerial robots: Controlling aerial robotic manipulators in outdoor industrial applications. IEEE Robotics and Automation Magazine vol. 26, no. 1, pp. 44-53 March. pdf | |
| F. J. Garcia-Rubiales, P. Ramon-Soria, B. C. Arrue and A. Ollero, "Magnetic detaching system for Modular UAVs with perching capabilities in industrial environments," 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), 2019, pp. 172-176, doi:10.1109/REDUAS47371.2019.8999704 | |
| P. Ramon-Soria, A. E. Gomez-Tamm, F. J. Garcia-Rubiales, B. C. Arrue and A. Ollero, "Autonomous landing on pipes using soft gripper for inspection and maintenance in outdoor environments," 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, pp. 5832-5839. doi:10.1109/IROS40897.2019.8967850 zenodo:3647962 | |
| S. R. Nekoo, J. Á. Acosta, A. E. Gomez-Tamm and A. Ollero, "Optimized Thrust Allocation of Variable-pitch Propellers Quadrotor Control: A Comparative Study on Flip Maneuver," 2019 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED UAS), 2019, pp. 86-95. doi:10.1109/REDUAS47371.2019.8999681 zenodo:3685593 | |
| M. Perez, A. Suarez, G. Heredia and A. Ollero, "Positioning System for Pipe Inspection with Aerial Robots Using Time of Flight Sensors". In: Silva, M., Luís Lima, J., Reis, L., Sanfeliu, A., Tardioli, D. (eds) Robot 2019: Fourth Iberian Robotics Conference. Advances in Intelligent Systems and Computing, vol 1092. Springer, Cham. doi:10.1007/978-3-030-35990-4_2 zenodo:3648017 | |
| P. J. Sanchez-Cuevas, V. Martín, G. Heredia and A. Ollero, "Aerodynamic Effects in Multirotors Flying Close to Obstacles: Modelling and Mapping". In: Silva, M., Luís Lima, J., Reis, L., Sanfeliu, A., Tardioli, D. (eds) Robot 2019: Fourth Iberian Robotics Conference. Advances in Intelligent Systems and Computing, vol 1092. Springer, Cham. doi:10.1007/978-3-030-35990-4_6 zenodo:3647908 | |
| A. Ramos, P. J. Sanchez-Cuevas, G. Heredia and A. Ollero, "Spherical fully covered UAV with autonomous indoor localization". In: Silva, M., Luís Lima, J., Reis, L., Sanfeliu, A., Tardioli, D. (eds) Robot 2019: Fourth Iberian Robotics Conference. Advances in Intelligent Systems and Computing, vol 1092. Springer, Cham. doi:10.1007/978-3-030-35990-4_29 zenodo:3647952 | |
| A. Caballero, P. J. Sanchez-Cuevas, M. Bejar, G. Heredia, M. A. Trujillo and A. Ollero, "An Aerodynamic Extension for Motion Planning with Dynamics Awareness in Aerial Long-Reach Manipulators", International Journal of Aerospace Engineering, vol. 2020, Article ID 6348035, 17 pages, 2020. doi:10.1155/2020/6348035 hindawi:ijae/2020/6348035.pdf | |
| Suarez, A. Caballero, A. Garofano, P. J. Sanchez-Cuevas, G. Heredia and A. Ollero, "Aerial Manipulator with Rolling Base for Inspection of Pipe Arrays," IEEE Access, vol. 8, pp. 162516-162532, 2020. doi:10.1109/ACCESS.2020.3021126 zenodo:4460258 | |
| A. Lopez-Lora, P. J. Sanchez-Cuevas, A. Suarez, A. Garofano-Soldado, A. Ollero and G. Heredia, "MHYRO: Modular HYbrid RObot for contact inspection and maintenance in oil & gas plants," 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 1268-1275, IROS 2020 Best Application Paper Award. doi:10.1109/IROS45743.2020.9341639 zenodo:4460438 | |
| S. R. Nekoo, J. Á. Acosta and A. Ollero, "Collision Avoidance of SDRE Controller using Artificial Potential Field Method: Application to Aerial Robotics," 2020 International Conference on Unmanned Aircraft Systems (ICUAS), 2020, pp. 551-556. doi:10.1109/ICUAS48674.2020.9213984 zenodo:4461062 | |
| Röning, Juha; Celentano, Ulrico (2021) Robotic inspection of oil and gas plants by hybrid unmanned vehicle and mobile ground support platform. In: Sergey Balandin, Juha Röning, Tatiana Shatalova (Eds.) Proceedings of the FRUCT'30, Oulu, Finland, 27-29 October 2021, (pp. 406-408). urn.fi:fe2022032424859 fruct (open access) | |
| F.J. Garcia-Rubiales, P. Ramon-Soria, B.C. Arrue and A. Ollero, "Soft-Tentacle Gripper for Pipe Crawling to Inspect Industrial Facilities Using UAVs", Sensors 2021, 21, 4142. doi:10.3390/s21124142 mdpi (Open Access) | |
| Suarez, M. Perez, G. Heredia and A. Ollero, "Cartesian Aerial Manipulator with Compliant Arm". Applied Sciences 2021, 11, 1001. doi:doi.org/10.3390/app11031001 mdpi (Open Access) | |
| F.J. Garcia Rubiales, P. Ramon Soria, B.C. Arrue and A. Ollero, "Soft-Tentacle Gripper for Pipe Crawling to Inspect Industrial Facilities Using UAVs". Sensors 2021, 21, 4142. doi:10.3390/s21124142 mdpi (Open Access) | |
| S. R. Nekoo, J. Á. Acosta, G. Heredia and A. Ollero, "A benchmark mechatronics platform to assess the inspection around pipes with variable pitch quadrotor for industrial sites", Mechatronics, Vol. 79, 2021, Article 102641. doi:10.1016/j.mechatronics.2021.102641" zenodo:5184684 | |
| Celentano, U.; Kauppinen, M.; Röning, J. (2021) Ground Support for Drone-based Industrial Inspections. 1st AIRPHARO Workshop on Aerial Robotic Systems Physically Interacting with the Environment. AIRPHARO Workshop on Aerial Robotic Systems Physically Interacting with the Environment. doi:10.1109/AIRPHARO52252.2021.9571042 | |
| S. R. Nekoo, P. J. Sanchez Cuevas, J. Á. Acosta, G. Heredia and A. Ollero, "Experimental Investigation of Soft-Landing of Quadrotors via Induced Wind Modeling Approach," 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), 2021. 10.1109/AIRPHARO52252.2021.9571054 zenodo:5642474 | |
| S. R. Nekoo, J. Á. Acosta, G. Heredia and A. Ollero, "Soft-Landing of Multi-Rotor Drones using a Robust Nonlinear Control and Wind Modeling," 2021 International Conference on Unmanned Aircraft Systems (ICUAS), 2021, pp. 1070-1079. doi:10.1109/ ICUAS51884.2021.9476763 zenodo:4916555 | |
| Röning J, Celentano U (2022) Hybrid robots for safe and effective oil and gas pipe inspection. International Conference on Intelligent Robots and Systems (IROS). 23-27 October. Kyoto, Japan. jultika | |
| F. Ruiz, B. Arrue and A. Ollero, "A flexible propelled arm: Mechanical considerations for the use in UAVs," 2022 International Conference on Unmanned Aircraft Systems (ICUAS), 2022, pp. 1047-1055. doi:10.1109/ICUAS54217.2022.9836149 arxiv:2204.13987 | |
| S. R. Nekoo, J. Á. Acosta and A. Ollero, "Geometric control using the state-dependent Riccati equation: application to aerial-acrobatic maneuvers", International Journal of Control, 95:7, 1875-1887, 2022. doi:10.1080/00207179.2021.1881165 zenodo:4616742 | |
| S. R. Nekoo, J. Á. Acosta and A. Ollero, "Quaternion-based state-dependent differential Riccati equation for quadrotor drones: Regulation control problem in aerobatic flight", Robotica, 40(9), 3120-3135, 2022. doi:10.1017/S0263574722000091 zenodo:6135692 | |
| S. R. Nekoo, J. Á. Acosta and A. Ollero, "Gravity compensation and optimal control of actuated multibody system dynamics", IET Control Theory Appl., Vol. 16, pp. 79-93, 2022. doi:10.1049/cth2.12206 zenodo:6135692 | |
| S. R. Nekoo, J. Á. Acosta, G. Heredia and A. Ollero, "A PD-Type State-Dependent Riccati Equation with Iterative Learning Augmentation for Mechanical Systems," in IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 8, pp. 1499-1511, 2022. doi:10.1109/ JAS.2022.105533 zenodo:6523679 | |
| F. Ruiz, B. C. Arrue and A. Ollero, "SOPHIE: Soft and Flexible Aerial Vehicle for Physical Interaction with the Environment," IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 11086-11093, Oct. 2022. doi:10.1109/LRA.2022.3196768 arxiv:2205.12883 | |
| A. Caballero, M. Bejar, G. Heredia and A. Ollero, "Hybrid motion planning with dynamics awareness for aerial-ground robots in industrial inspection and maintenance", Robotics and Autonomous Systems, Submitted. |
| Röning J, Ollero A (2018) Flying robot gets wheels and arm. Interview by Mikkola A, Finnish newspaper Kaleva (in Finnish). 11 Jan. | |
| Röning J, et al. (2018) Presentation of HYFLIERS project. European Robotics Forum (ERF 2018). Tampere, Finland. 13-15 Mar. | |
| Lippiello V (2018) HYFLIERS: HYbrid FLying-rollIng with-snakE-aRm robot for contact inSpection. Maker Faire Rome, 12-14 Oct, Rome, Italy. | |
| Lippiello V, Röning J (2018) Drones beyond the hobby. Maker Faire Rome, 13 Oct, Rome, Italy. | |
| Brown R, Röning J (2019) Hyfliers – UT inspections at height in congested pipe racks. European Robotics Forum (ERF), Aerial Robotics Technologies and Applications. 20-22 March, Bucharest, Romania. | |
| Röning, Juha (2020) Combining aerial and ground robot to solve inspection tasks in refineries. European Robotics Forum (ERF). Malaga, Spain, 3 March. Presentation. | |
| Röning, Juha, et al. (2020) HYFLIERS: Hybrid flying-rolling with-snake-arm robot for contact inspection. European Robotics Forum (ERF). Malaga, Spain, March. Poster. | |
| Röning, Juha, et al. (2020) HYFLIERS: Project overview and current achievements. International Conference on Robotics and Automation (ICRA). Online, May-August. Video. |
Project Coordinator
Technical Coordinator